CANIBOTX
Un budget de 800€
+200h de travail
Une équipe de trois
Canibot le chien robot est un projet qui a vu le jour, il y a bientôt deux ans. La réflexion autour de ce robot a abouti à la conception d'un premier prototype. Mais la finalité de ce projet devrait prochainement voir le jour grâce à vous !
Canibot sera un chien robot guide d’aveugle capable de guider les malvoyants dans leurs trajets du quotidien, permettant ainsi par une simple commande vocale de rejoindre sa destination finale sans encombres. Cette plateforme robotique d’une autonomie de dix kilomètres sera capable d’éviter les obstacles, de calculer
le meilleur itinéraire et de s’adapter aux différentes situations qui se présenteront à elle (travaux sur la chaussée, feux tricolores …)
Ce type de robot autonome n'est pas simple à mettre en place car cela revient à mettre la vie d'une personne entre les "pattes" d'un robot, ce qui rejoint la problématique de la voiture autonome. Il faudra donc beaucoup de temps avant d'envisager de produire Canibot de façon conséquente.
Un projet rentable peut être, mais il est surtout question de démocratiser un marché actuellement très peu exploité.
Rendre accessible Canibot à tout public, grâce à son faible coût et à sa vocation à être open source, c'est possible ! Et vous pourrez ainsi développer vos propres applications et l’adapter aux tâches que vous désirez.
Il faut avant tout répondre aux besoins et aux demandes des clients, il nous faut donc nous diversifier, et c'est pourquoi Canibot sera donc adapté dans divers domaines. Plateforme robotique de haute technologie et modulaire, pour répondre aux besoins de tous ! Nous allons donc, en parallèle, développer des applications plus simples pour notre robot.
Les domaines sont divers et variés car une plateforme robotique quadrupède se veut stable, capable de s'adapter aussi bien aux environnements urbains qu'aux milieux ruraux et bien sûr tout-terrain.
Initialement Canibot était notre projet pour le BAC, avec un budget d’environ 800€ et plus de 200 heures de travail, nous avons quasiment réussi à faire un prototype fonctionnel. Je vous propose donc de revenir un peu sur l'évolution de ce projet à travers les différentes étapes de conception et d'échange.
Avant de nous lancer dans le développement de Canibot nous avons dû passer par des phases de brainstorming, d'études de faisabilité et de réalisation de croquis ...
juin 2018
Une fois nos solutions en tête, le développement a pu commencer. Nous avons créé la maquette 3D du robot et effectué diverses simulations ...
novembre 2018
Une fois le matériel arrivé, nous avons pu entamer la phase d'assemblage de notre robot. La structure a été créé, l'électronique a été installé et la programmation a débuté ...
février 2019
Nous avons pu partager notre projet de diverses manières : notamment lors du Salon Laval Virtual ou encore aux Olympiades de SI (où nous avons gagné un prix) ...
avril 2019
Étant désormais livrés à nous-mêmes financièrement et afin de pouvoir continuer à développer Canibot, nous organiserons une campagne de financement par le biais de Kickstarter.
Nous sommes 2 étudiants, Benjamin, passionné par la robotique et l'électronique depuis toujours, suit actuellement un cursus scolaire en BTS CRSA (Conception et Réalisation de Système Automatisé ). Théo quant à lui, suit des études en Bachelor Informatique option Architecture Systèmes et Réseaux.
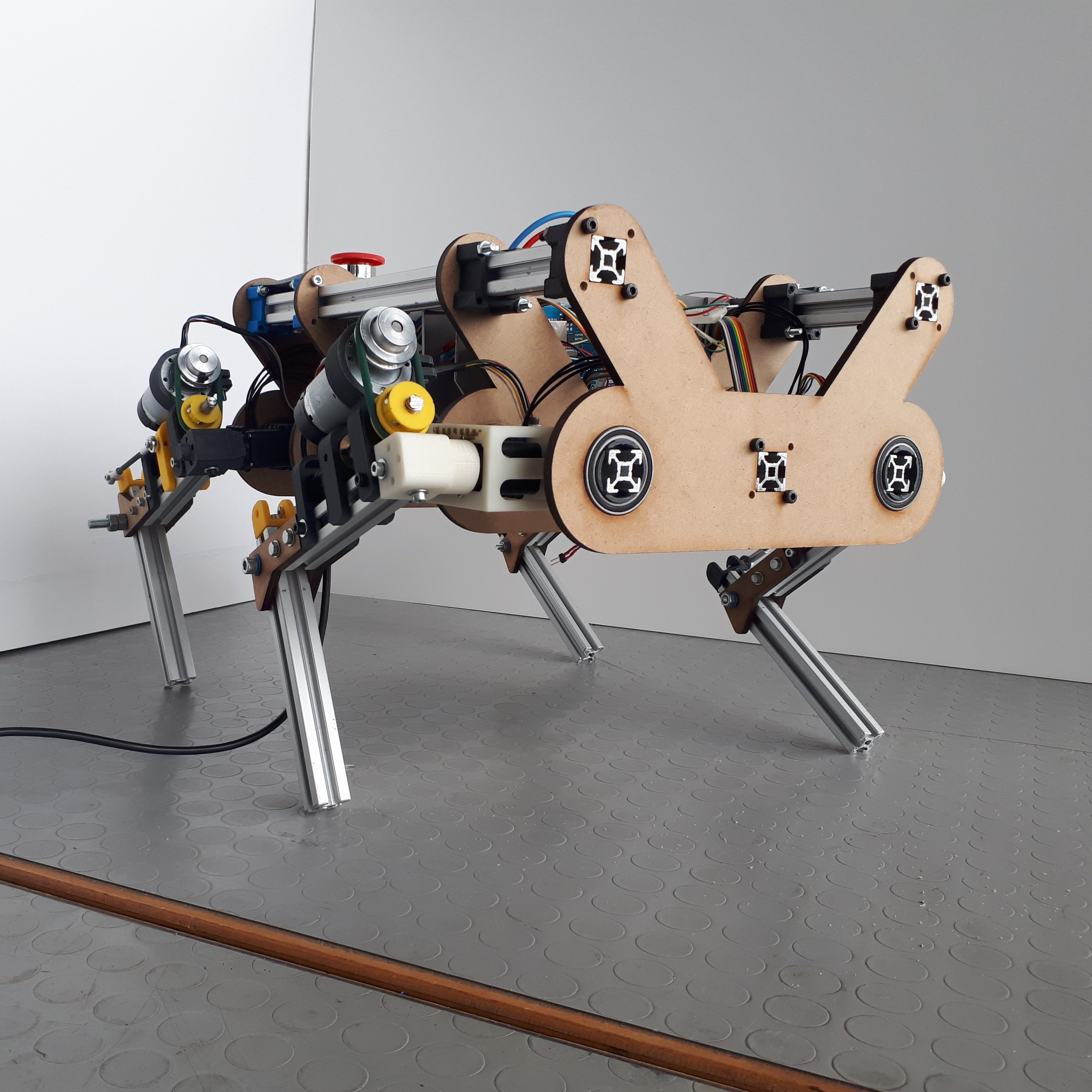
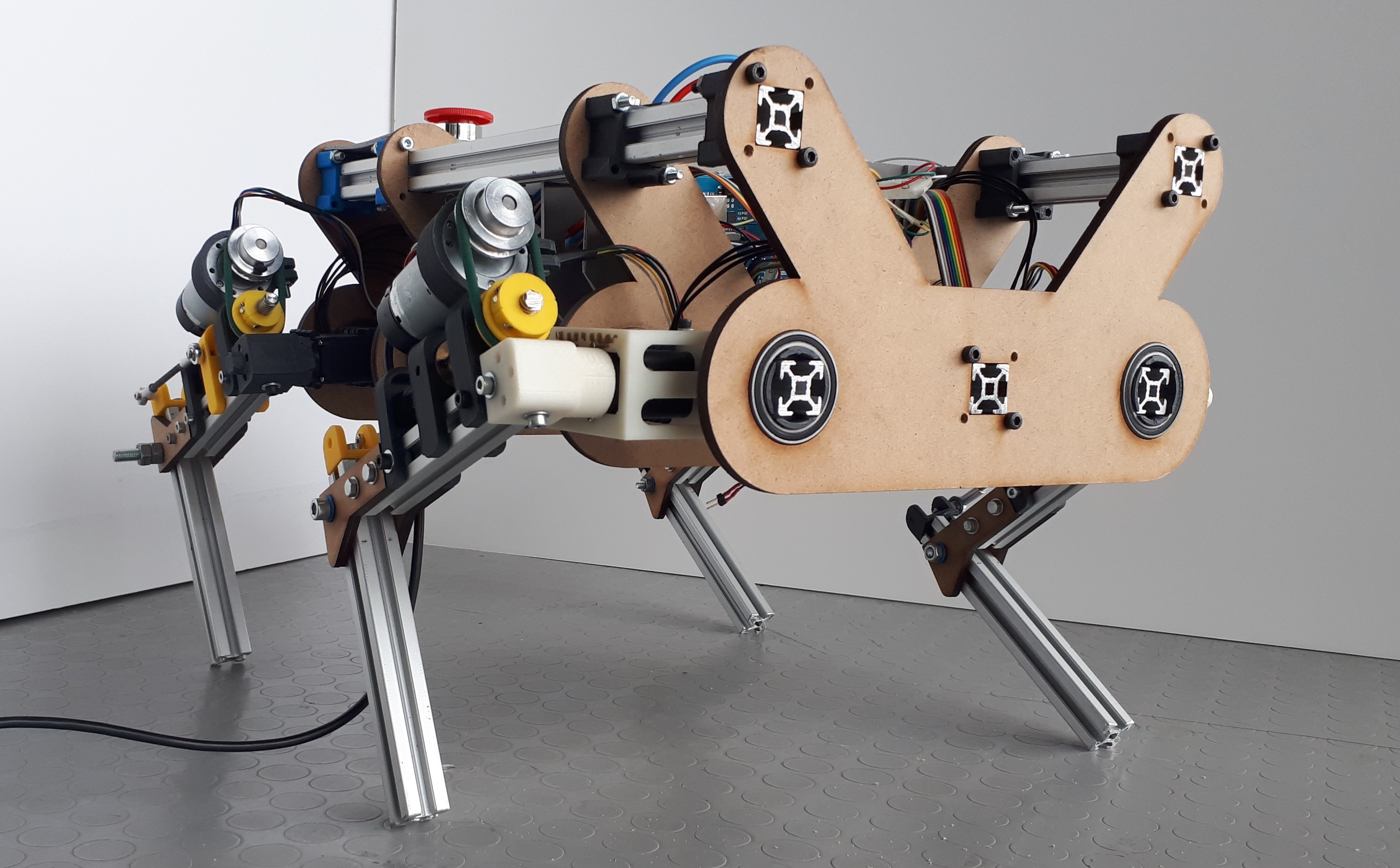
Le 1er prototype Canibot finalisé
Discution avec Paul JAUFFRIT & Pascale ISEL, malvoyants
Notre équipe au complet
On commence la communication, y compris dans la presse, voici l'article
Rendu réalisé au mois de juin 2019
Rendu réalisé au mois de septembre 2019
Rendu réalisé au mois de décembre 2019
Rendu réalisé au mois de décembre 2019







